
ثبت اختراع بحث مورد علاقه ی بسیاری از دانش آموزان و دانشجویان و مبتکران خلاق کشور عزیزمان است .
اما اطلاع رسانی چندانی در این زمینه انجام نمی شود . به همین دلیل بر آن دیدیم تا سوالات رایج و احتمالی موجود در این زمینه را به اطلاع عموم برسانیم لذاسوالات زیر که سوالات بسیاری از علاقه مندان به ثبت اختراع است به همراه جواب کامل به استحضار دوستان می رسد .
1 - برای ثبت اختراع به کجا مراجعه کنیم؟
برای ثبت اختراع باید به اداره کل ثبت شرکتها و مالکیت صنعتی واقع در تهران، خیابان میرداماد، تقاطع بزرگراه مدرس- میرداماد، مراجعه شود.
2- آیا به جز تهران ثبت اختراع در جای دیگری صورت میگیرد؟
خیر، در حال حاضر ثبت اختراع فقط در تهران و در اداره کل ثبت شرکتها و مالکیت صنعتی انجام میگیرد.
3) چه نوع اختراعاتی قابل ثبتاند؟
اختراعاتی قابل ثبتاند که جدید بوده و حاوی گامی ابتکاری و دارای کاربرد صنعتی باشند.
4) چه نوع اختراعاتی از حیطه حمایت از اختراع خارج خواهند بود؟
موارد زیر از حیطه حمایت از اختراع خارجاند: 1) کشفیات، نظریههای علمی و روشها ریاضی 2) طرحها و قواعد یا روشهای انجام کار تجارت و آنچه برای فعالیتهای صرفاً فکری یا بازی کردن میباشند. 3) روش معالجه بدن انسان یا حیوان از طریق درمان یا جراحی و همچنین روشهای تشخیص بیماریها که روی بدن انسان یا حیوان انجام میگیرند.
5) برای ثبت اختراع چه مدارکی لازم است؟
برای ثبت اختراع باید مدارک زیر تکمیل و به اداره کل ثبت شرکتها و مالکیت صنعتی تحویل گردد:
• اظهارنامه ثبت اختراع در 3 نسخه: اظهارنامـه ثبت اختـراع فـرم مخصوصـی است که جزء اوراق بهادار میباشد و متقاضی میبایستی از واحد گردش اوراق بهادار مستقر در اداره کـل ثبت شرکتها و مالکیت صنعتی آن را تهیه و نسبت به تکمیل و امضاء آن اقدام نماید (نمونهای از این فرم در انتهای پرسش و پاسخ آمده است)
• توصیف مشروح اختراع در 3 نسخه: اختراع مورد ادعای مختـرع بـاید به طور کـامل شرح داده شود. در شرح اختراع باید تمام جنبههای اختراع ادعایی به طور واضح بیان گردد. در تهیه شرح اختراع از کاغذای A4 استفاده شود.
• نقشههای اختراع در 3 نسخه: نقشه کامل اختراع باید با مرکب و از روی مقیـاس متـری تهیه و ذیل نقشهها را متقاضی یا وکیل او امضاء نمایند. نقشههای اختراع باید روی کاغذ 34 سانتیمتـر طـول و 22 سانتیمتـر عـرض رسـم گردند و فقط از یک روی کاغذ استفاده شود.
• ادعا در 3 نسخه: اینکه اختراع با ارائه راهحل عملی چه مشکلی را حـل مـیکنـد و چه مزایایـی دارد و اطلاعاتـی کـه میزان حمایت ناشی از حق ثبت را مشخص نماید.
• فتوکپی شناسنامه مخترع یا مخترعین
• قبض رسید بانکی حقالثبت اظهارنامه تقاضای ثبت اختراع
6) آیا برای ثبت اختراع حتماً باید خود مخترع اقدام نماید؟
خیر، تقاضای ثبت اختراع میتواند توسط وکیل متقاضی انجام شود. در این صورت تقاضانامه باید همراه اصل وکالتنامه با رونوشت یا فتوکپی برابر اصل شده ضمیمه اظهارنامه شود.
7) سیستم ثبت اختراع در کشور ما چگونه است؟
سیستم ثبت اختراع در کشور ما، سیستم اعلامی است. بر اساس این سیستم، ثبت اختراع طبق ادعای مخترع صورت میگیرد. یعنی ادعای مخترع مقرون به صحت تلقی شده و به شرط عدم سابقه ثبت، ادعای مخترع (با رعایت اینکه اختراع در حیطه حمایت ثبت قرار دارد یا خیر/ بند 4 پرسش و پاسخ) به ثبت میرسد.
8) اعتبار ورقه (سند) اختراع چند سال است؟
در حقوق ایران مدت اعتبار ورقه ثبت اختراع به تقاضای مخترع 5 یا 10 یا 15 و یا منتهی به 20 سال خواهد بود که باید صراحتاً در ورقه ثبت اختراع قید شود.
9) در صورت قبول یا رد اختراع چه اقداماتی انجام میگیرد؟
• در صورت قبول اختراع مراتب ثبت اختراع به صورت آگهی تهیه شده و جهت درج در روزنامه رسمی کشور تحویل متقاضی یا وکیل او میگردد. پس از درج در روزنامه رسمی یک نسخه از روزنامه به اداره مالکیت صنعتی ارائه و گواهینامه ثبت اختراع توسط اداره مزبور کامل شده و یک نسخه از توصیف، ادعا و نقشه اختراع ضمیمه و قیطانکشی شده با امضاء مدیر کل و ممهور به مهر اداره کل ثبت شرکتها و مالکیت صنعتی تسلیم متقاضی یا وکیل قانونی او میشود.
• در صورت رد اختراع، کتباً (برگ اخطار اداری) به متقاضی یا وکیل قانونی او ابلاغ میگردد. در این صورت متقاضی یا وکیل قانونی او میتواند، ظرف 10 روز از تاریخ ابلاغ رد اظهارنامه نسبت به تقدیم دادخواست و شکایت از تصمیم اداره کل ثبت شرکتها و مالکیت صنعتی به مراجع ذیصلاح قضایی مستقر در تهران اقدام نماید. چنانچه در مدت 10 روز از تاریخ ابلاغ تصمیم اداره مالکیت صنعتی نسبت به تقدیم دادخواست اقدام نشود، دیگر ادعا در مراجع ذیصلاح قضایی مسموع نخواهد بود.
10) ارزیابی و تأیید علمی اختراع چیست و مرجع قانونی آن کجاست؟
منظور از ارزیابی و تأیید علمی اختراع جستجو و بررسی علمی سند اختراع توسط متخصصین مربوطه با استفاده از تجارب علمی، مشاورهها و بانکهای اطلاعاتی داخلی و خارجی است و طبق قانون این ارزیابی توسط وزارت علوم، تحقیقات و فناوری و از طریق مراکز علمی، تحقیقاتی کشور صورت میگیرد.
11) آیا ارزیابی و تأیید علمی اختراع اجباری است؟
خیر، اختیاری است. تقاضا برای ارزیابی و تأیید علمی اختراع هم میتواند از طریق شخص متقاضی و هم از طریق اداره کل ثبت شرکتها و مالکیت صنعتی صورت گیرد.
12) آیا ارزیابی و تأیید علمی اختراع هزینهای دربر دارد؟
در حال حاضر خیر.
13) آیا برای ارزیابی و تأیید اختراع شرایط خاصی وجود دارد؟
برای پذیرش تقاضای ارزیابی و تأیید علمی اختراع شرایط زیر ضروری است:
1-13) ثبت اولیه اختراع در مراجع حقوقی (اداره کل ثبت شرکتها و مالکیت صنعتی) و ارائه ورقه ثبت
2-13) ارائه تقاضای ارزیابی و تأیید علمی اختراع، همراه با مدارک کامل و مستند اختراع ثبت شده
3-13) ارزیابی و تأیید علمی اختراع بیش از 2 بار انجام نخواهد گرفت (بدین معنی که در صورت رد اعتبار علمی اختراع متقاضی تنها یکبار دیگر ارزیابی علمی آن توسط مرجع دیگری غیر از مرجع بررسی کننده اولیه، امکانپذیر است).
14) برای درخواست ارزیابی و تأیید علمی اختراع به کجا باید مراجعه کرد؟
برای درخواست ارزیابی و تأیید علمی اختراع لازم است که به ”اداره کل امور نوآوران و ارزشیابی فناوری“ واقع در تهران، خیابان انقلاب، میدان فردوسی، خیابان فرصت جنوبی، شماره 71، طبقه پنجم مراجعه شود. علاوه بر اداره کل امور نوآوران و ارزشیابی فناوری برای ارزیابی و تأیید علمی اختراع میتوان به مراجع منطقهای زیر نیز مراجعه کرد.
1) تهران بزرگ: سازمان پژوهشهای علمی و صنعتی ایران، دانشگاه تهران (واحدهای IP)
2) مرجع منطقهای مرکزی کشور، اصفهان، دانشگاه صنعتی اصفهان (واحد IP)
3) مرجع منطقهای جنوب کشور، شیراز، دانشگاه شیراز (واحد IP)
4) مرجع منطقهای شرق کشور، مشهد، دانشگاه فردوسی مشهد (واحدIP )
5) مرجع منطقهای شمالغربی کشور، تبریز، دانشگاه تبریز (واحد IP)
15) برای درخواست حمایت از تکمیل اختراع و تجاری کردن اختراع به کجا میتوان مراجعه کرد؟
برای درخواست حمایت از تکمیل اختراع میتوان مستقیماً به ”مراکز رشد“ و برای تجاری کردن اختراع مستقیماً به ”پارکهای فناوری“ مراجعه کرد. علاوه بر موارد فوق، کلیه مراجع منطقهای (مراجع مندرج در بند 14) و اداره کل امور نوآوران و ارزشیابی فناوری آماده راهنمایی و معرفی متقاضیان به مراکز رشد و پارکهای فناوری و دیگر نهادها و سازمانهای حمایت کننده از نوآوران، هستند. نشانی، تلفن و نمابر کلیه مراکز رشد و پارکهای فناوری را میتوان از اداره کل امور نوآوران و ارزشیابی فناوری دریافت کرد.
16) آیا برای ثبت اختراع در خارج از کشور حمایت مالی صورت میگیرد؟
بله، مخترعینی که اختراعات آنها واجد شرایط زیر باشند میتوانند از حمایت مالی ثبت در خارج از کشور به میزان 50 درصد کل هزینه برخوردار شوند.
1-16) اختراع آنها در داخل کشور (اداره کل ثبت شرکتها و مالکیت صنعتی) به ثبت رسیده باشد.
2-16) ارزیابی و تأیید علمی از وزارت علوم، تحقیقات و فناوری (از طریق اداره کل امور نوآوران و ارزشیابی فناوری و یا مراجع منطقهای مندرج در بند 14) دریافت کرده باشند.
3-16) وکیل قانونی خود را انتخاب و معرفی کرده باشند.
4-16) برای اختراع خود طرح کسب و کار (Business plan) تهیه کرده باشند.
5-16) فرمهای مربوط به WPIS را تکمیل کرده باشد.
6-16) مجوز حمایت مالی را از ”کمیته تخصصی ثبت اختراعات در خارج“ کسب کرده باشند.
برای آگاهی بیشتر از نحوه ثبت اختراعات در خارج از کشور و برخورداری از حمایت مالی، به دستورالعمل تهیه شده در این زمینه در اداره کل امور نوآوران و ارزشیابی فناوری مراجعه شود.
17) برای دریافت اطلاعات بیشتر در همه موارد یاد شده بالا (16 پرسش و پاسخ) میتوانید
به اداره کل امور نوآوران و ارزشیابی فناوری واقع در تهران، خیابان انقلاب، میدان فردوسی، خیابان فرصت جنوبی، شماره 71، طبقه پنجم مراجعه فرمائید.
اجزای ساخت ربات:
1) سنسورها
2) مبدل ADC (مبدل آنالوگ به دیجیتال)
3) میکروکنترلر
4) درایور
5) موتورها
6) منبع تغذیه
7) مکانیک ربات
توضیحات ساخت:
1)سنسورها
وظیفه سنسورها تشخیص خط مشکی در زمینه سفید است،اما چگونه؟اصول این کار به این طریق است که سنسورفرستنده یک اشعه مادون قرمز را ارسال میکند.اگر این اشعه به سطح سفید برخورد کند منعکس شده و به گیرنده سنسور میرسد و در خروجی سنسور ولتاژ 5 ولت به وجود می آید واین بدین معنی است که سطح زیر سنسور سفید رنگ است ولی اگر این اشعه به خط مشکی برخورد کند توسط سطح سیاه جذب شده و منعکس نمیشود در نتیجه خروجی سنسور 0 ولت را نشان داده که به معنی این است که سطح زیر سنسور خط مشکی است.سنسورهای زیادی وجود دارند که میتوانند برای اینکار مورد استفاده قرار بگیرند ولی ما در این پروژه از سنسور مادون قرمز CNY70 استفاده میکنیم.این سنسور شامل یک گیرنده و فرستنده مادون قرمز در یک بسته(PACKAGE) می باشد و دارای 4 پایه میباشد که دو پایه مربوط به LED فرستنده و دو پایه مربوط به ترانزیستور گیرنده است.شکل ظاهری این سنسور به همراه نحوه تشخیص پایه های آن در شکل زیر قرار داده شده است.

سنسورهای ربات باید در کنار یکدیگر و در زیر ربات قرار بگیرند و تا حد ممکن نزدیک سطح زمین نصب شوند تا دقت خود را از دست ندهند.
2) مبدلADC (مبدلآنالوگبهدیجیتال)
تا این لحظه موفق شدیم که تفاوت سطح سیاه و سفید را با استفاده از سنسور تشخیص بدهیم و در خروجی سنسورها ولتاژی متناسب با رنگ سطح زیر ربات به وجود بیاوریم.حالا باید به این نکته توجه کنیم که ولتاژ خروجی سنسورها یک ولتاژ آنالوگ است و برای اینکه بتوانیم این ولتاژ را به میکروکنترلر بدهیم ابتدا باید آن را به دیجیتال تبدیل کنیم چون میکروکنترلر یک سیستم مبتنی بر مدارات منطقی است و میدانیم که مدارات منطقی فقط با سطوح دیجیتال(0و1)سروکار دارند.برای اینکار از مبدل ADC استفاده میکنیم.یکی از قطعاتی که میتواند اینکار را برای ما انجام بدهد استفاده از آی سیLM324 است.این آی سی در واقع یک تقویت کننده عملیاتی(OP-AMP) است که ما از ویژگی قطع و اشباع آن برای تبدیل ولتاژ آنالوگ به دیجیتال استفاده میکنیم.جهت کسب اطلاعات بیشتر درباره این آی سی و سایر قطعات الکترونیکی این ربات میتوانید با مراجعه به سایت WWW.ALLDATASHEET.COM و وارد کردن نام قطعه مورد نظر خود در قسمت بالای این سایت اطلاعات کاملی درباره قطعه مورد نظر خود به دست آورید.در شکل زیرنحوه اتصال خروجی سنسورها به مبدل ADC نشان داده شده است

3)میکروکنترلر
مغز متفکر ربات میکروکنترلر آن میباشد.کلیه تصمیم گیری ها و عملکردها در این قسمت اتفاق می افتد.در واقع ما میتوانیم سنسورها را به چشم های ربات،میکروکنترلر را به مغز ربات و موتورها را به دست و پاهای ربات تشبیه کنیم.
1-3)انتخابنوعمیکروکنترلر:بحث در مورد انتخاب نوع میکروکنترلر شامل بررسی میزانRAMوROM مورد نیاز،سرعت CPU،تعداد پورت ها،قیمت و.. میباشد که بحث بسیار گسترده ای میباشد.در مورد انتخاب نوع میکرو باید بگویم که شما میتوانید از میان سه خانواده میکرو موجود در بازار یعنی 8051،AVR و PIC یکی را بنابر نظر خود انتخاب کنید.ولی تجربه نشان داده که میکروکنترلرهای خانواده AVR برای اینکار مناسب تر هستند چون زبان برنامه نویسی ساده تری نسبت به 8051 ها دارند و همچنین تهیه کردن آنها و یافتن پروگرامر برای آنها در بازار نسبت به خانواده PIC آسان تر است.من در این پروژه از میکروکنترلر ATMEGA8 از خانواده AVR استفاده کرده ام.شما میتوانید جهت کسب اطلاعات بیشتر درباره خانواده های میکروکنترلر و مزایا و معایب آنها،زبان های برنامه نویسی،نحوه پروگرام کردن آنها و.. به مراجع متناسب با این موضوعات مراجعه کنید.
2-3)برنامهنویسی:الگوریتم برنامه نویسی این ربات را در ابتدای این مقاله توضیح دادم.یعنی شما باید با توجه به 0 و 1 شدن خروجی سنسورها تشخیص بدهید که دریک لحظه خاص ربات در سطح سفید قرار گرفته است یا مشکی و در این لحظه خاص باید مستقیم برود یا به چپ یا راست بپیچد.در اینجا جدولی قرار داده ام که تمامی عملکرد منطقی ربات را به شما نشان داده است.یعنی با درک این جدول شما توانایی درک کامل نحوه عملکرد ربات و چگونگی برنامه نویسی آن را فرا میگیرید.پس روی این بخش تمرکز ویژه ای داشته باشید.

در این جدول منظور از 0 در زیر قسمت سنسورها یعنی سطح سیاه دیده شده و 1 یعنی سطح سفید.در موتورها همم منظور از 0 خاموش بودن موتور و 1 به معنی روشن بودن آن موتور است.درکل 4 حالت برای حرکت ربات وجود دارد : 1)پیچیدن به سمت راست(دو حالت اول جدول) ، 2)پیچیدن به سمت چپ (حالت سوم و چهارم جدول) ، 3)حرکت مستقیم (حالت پنجم و ششم جدول) ، 4)حالت خطا یا تعریف نشده (حالت هفتم و هشتم جدول). دو حالت اول زمانی اتفاق می افتد که ربات در طی مسیر خود به پیچی به سمت راست برسد در نتیجه باید به سمت راست بپیچد.یکی از روش های پیچیدن خاموش کردن موتور همان سمت(سمت راست) و روشن ماندن موتور سمت چپ است در نتیجه ربات به سمت راست می پیچد.درک بقیه حالت ها هم با تصور کردن یک مسیر فرضی و قرار دادن سنسورها بر روی این مسیر امکان پذیر است.با استفاده از این جدول و مقداری آشنایی با برنامه نویسی میکروکنترلرها به راحتی میتوان برنامه ربات را طراحی کرد.در هنگام وصل موتورها به چرخ های ربات باید توجه کنید که یک موتور را به چرخ های سمت راست و یک موتور را به چرخ های سمت چپ متصل کنید تا بتوان بر روی پیچیدن ربات کنترل داشت(بر خلاف اتوموبیل که چرخ های روبه روی هم به یکدیگر متصل میشوند در این نوع ربات چرخ های پشت سرهم به یکدیگر متصل میشوند).
خروجی سنسورها پس از تبدیل شدن به سطوح دیجیتال توسط مبدل ADC به یکی از پورت های میکروکنترلر وارد میشود و ما در برنامه شبیه ساز میکروکنترلر این پورت را به عنوان ورودی تعریف کنیم.همچنین باید یکی دیگر از پورت های میکرو را به عنوان خروجی تعریف کنیم که این پورت به موتورها متصل میشود.شما میتوانید از برنامه CODE VISION AVR جهت برنامه نویسی و پروگرام کردن میکروکنترلر استفاده کنید.جهت نصب برنامه و همچنین آشنایی با نحوه کارکردن با این برنامه میتوانید از سی دی ها و کتاب های موجود در بازار استفاده کنید.در زیر برنامه ربات با 3 سنسورقرار داده شده است.
برنامهکاملربات
در برنامه code vision پس از ایجاد کردن یک new project و تنظیم پورت های ورودی و خروجی در قسمت code wizard(توجه شود در این پروژه پورت D میکرو کنترلر به عنوان ورودی و پورت C به عنوان خروجی در نظر گرفته شده است) برنامه را در حلقه while(1) بنویسید. سپس روی گزینه compile در بالای صفحه کلیک کنید تا فایل hex برنامه تولید شود سپس این فایل hex را با استفاده از پروگرامر به میکرو منتقل کنید.
4)درایور: برای اتصال میکرو به موتورها از آی سی به نام درایور استفاده میکنیم.چون موتورها در هنگام کار کردن به جریانی حدود 1.5 آمپر احتیاج دارند ما نمیتوانیم آنها را مستقیم به پایه های میکروکنترلر متصل کنیم چون حداکثر جریانی که میکروکنترلر میتواند به ما بدهد در حدود چند میلی آمپر است.به همین علت ما از آی سی هایی موسوم به بافر یا درایور استفاده می کنیم.از مزایای این آی سی ها قابلیت جریان دهی مناسب برای موتورها،داشتن دیود هرزگرد داخلی برای از بین بردن اثر سلفی موتورها، قابلیت ترمز کردن و.. را میتوان نام برد.از جمله این آی سی ها میتوان به L293,L298,ULN2803 و..اشاره کرد.شما میتوانید با مطالعه برگه مشخصات این آی سی ها درایور مورد نیاز خود را انتخاب کنید.در زیر نحوه اتصال درایورL239 به میکروکنترلر و موتورها نشان داده شده است.

5)موتورها: با توجه به حجم و وزن ربات خود میتوانید از موتورهای با قدرت مختلف استفاده کنید.موتور ربات هایی ساده تر و غیر حرفه ای میتواند یک موتور DC (آرمیچر) باشد و برای کارهای حرفه ای میتوان از موتور پله ای استفاده کرد.در واقع برای این پروژه شما میتوانید بدون هیچ نگرانی از موتور DC استفاده کنید.

6)منبعتغذیه:جهت تغذیه مدارات الکترونیکی و موتورهای ربات از منبع تغذیه استفاده می شود.برای مدارات الکترونیکی به یک ولتاژ 5 ولت DC احتیاج است.برای موتورها هم به تغذیه ای در حدود6 الی 12 ولت (بنابر وزن و نوع موتورهای ربات شما) احتیاج است.نکته مهم این است که تغذیه مدارات الکترونیکی و موتورها را به صورت مستقیم از یک باتری تامین نکنید چون نویزی که در هنگام کار کردن موتورها بر روی ولتاژ تغذیه می افتد باعث اختلال در مدارات الکترونیکی میشود و پیشنهاد من استفاده از رگولاتور است.

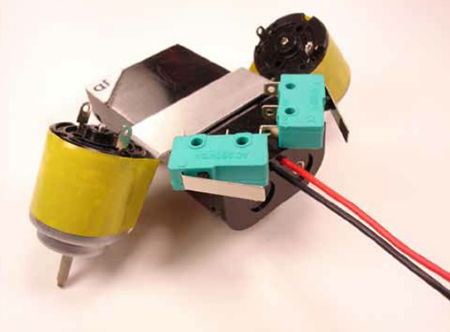
7) مکانیکربات:اگر شما تا این مرحله پیش رفته اید باید به شما تبریک گفت اما نه بابت ربات ! بلکه به خاطر ساخت یک مدار الکترونیکی.برای اینکه ربات شما حرکت کرده و انتظارات شما را برآورده کند اولا احتیاج به سازه ای دارد که مدارات الکترونیکی و باتری و.. را نگه دارد و ثانیا دارای محل مناسبی برای قرار گرفتن سنسورها در نزدیک سطح زمین باشد و از همه مهمتر دارای چرخ و گیربکس مناسبی برای تبدیل دوران شافت موتور به نیروی حرکتی باشد.شما میتوانید از گیربکس و چرخ موجود در ماشین های اسباب بازی برای اتصال به موتور استفاده کنید یا اگر میخواهید یکم خرج کنید از موتورهای گیربکس دار موجود در بازار استفاده کنید.در اینجا تصویری از چرخ و گیربکس ربات خودم را برای شما قرار دادم.همانطور که مشاهده میکنید هر موتور به چرخ های یک طرف متصل شده است.گیربکس ربات که وظیفه انتقال دوران شافت موتور به چرخ ها را بر عهده دارد شامل تعداد زیادی از چرخ دنده هاست.استفاده از گیربکس باعث میشود که سرعت زیاد شافت موتور کاهش پیدا کرده و در عوض قدرت چند برابر شود.در تصویر دوم هم تصویری از ربات را مشاهده میکنید.دقت کنید بخاطر اینکه سنسورها در نزدیک سطح زمین قرار بگیرند توسط دو پایه چوبی آنها را پایین آورده ونزدیک سطح زمین قرار داده ام.

تصویر (1) موتورها و گیربکس ربات

تصویر (2) شمای ظاهری ربات
درفرایندساخت ربات سه چیز حرف اول رامی زند(دقت)(فکرکردن)و(منظم کارکردن)شماهم دست به کارشوید

در این اموزش روش ساخت یک ربات کوچک و ساده بصورت گام به گام و تصویری آموزش داده شده که براحتی هم ساخته میشود ، شما می توانید اولین قدم در دنیای جالب رباتیک را با ساختن این ربات برداریداین یک ربات بسیار ساده است که می تواند روی زمین حرکت کرده و بابرخورد به هرمانع مسیر خودرا عوض کنداین ربات به هیچ ای سی و تراشه ای نیاز ندارد وخیلی ساده هم ساخته می شود.
چرا ساخت این ربات راحت است ؟
- بدون هیچ برنامه ریزی است
- از قطعات تخصصی تر مثل ای سی و تراشه های الکترونیکی در آن استفاده نشد ه است
این ربات چه کاری انجام می دهد؟
این ربات یک ربات ساده و مقدماتی است . به سمت جلو حرکت می کند و با برخورد شاخک های آن به هر مانع مسیرش را عوض
می کند تا از آن مانع بتواند عبور کند و با برخوردهای مختلف به موانع گوناگون مسیرش مرتبا عوض می شود.
توصیه های قابل توجه:
اگر نوجوان هستید یا کار با این وسایل و انجام برخی از مراحل (مثل لحیم کاری) برایتان مشکل است حتما از افراد حرفه ای تر و
با تجربه تر کمک بگیرید.
هنگام کار حتی الامکان از عینک ایمنی هم استفاده کنید.
سایر نکات ایمنی را رعایت کنید.
برای ساخت این ربات چه قطعاتی مورد نیاز است ؟
وسایل مورد نیاز را در شکل زیر می بینید

قطعاتی که شما نیاز دارید:
2عدد ارمیچر 1.5ولتی
تاچ سنسور2عدد
2عدد باتری1.5ولتی
جاباطری
چرخ کوچک که میتوانید از یک گوی توخالی هم استفاده کنید
گیره ی کاغذ
-سیم ، چسب ، و برخی وسایل جانبی که در طی مراحل کار با آنها آشنا می شوید
شروع به ساخت ربات می کنیم :
13قطعه سیم به اندزه 6سانتی متر برش می دهیم

یک بار دیگر تصویر کلی لوازم مورد نیاز را در تصویر زیر میبینید

ابتدا طبق تصویر زیر سیم ها را به قطعاتی که نشان داده شده لحیم کنید .

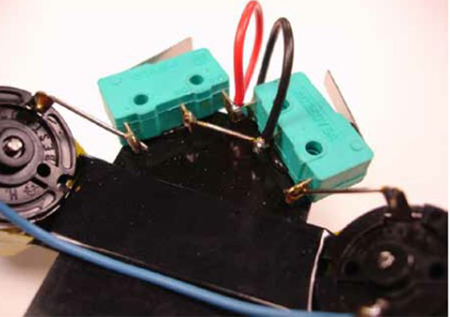
سنسور های تاچ یا همان سویچ ها را به قسمت صاف جاباطری با چسب محکم بچسبانید

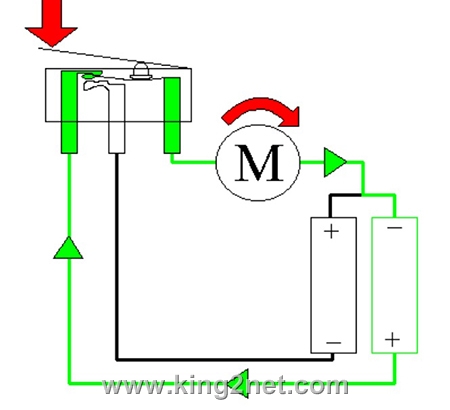
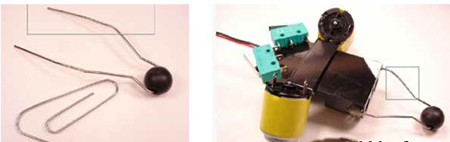
در اینجا لازمه که نحوه ی کار سنسور تاچ و استفاده ای که در این ربات از این سنسور را بهتر آشنا شوید . در تصاویر زیر کاملا واضح و مشخص نحوه ی کاراین قطعه در ربات نشان داده شده است.

و
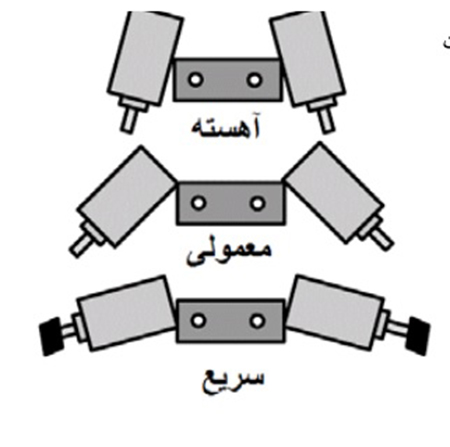
در مرحله بعد موتورها را نیز با یک زاویه ی مناسب با کناره های جاباطری بچسبانید اگر این کار براحتی صورت نمی گیرد می توانید برای اتصال محکم تر و بهتر از یک نوار پلاستیکی مطابق شکل زیر استفاده کنید.

و

چگونه جهت حرکت ربات را تنظیم کنیم؟
جهت چرخش موتورها باید بصورتی باشد که ربات کوچک شما به سمت جلو حرکت کند با تنظیم درست سیم مثبت و منفی موتورهامی توانید به نتیجه ی درست برسید. امتحان کنید تا به حالت مطلوب دست پیدا کنید.
شکل کلی ربات ما تا الان به این صورت است که در شکل می بینید .
شکل کلی ربات ما تا الان به این صورت است که در شکل می بینیدشما می توانید با تنظیم زاویه ی موتورها نسبت به سطح افقی سرعت ربات خود را نیز تنظیم کنید.
توجه : در تمام مراحل باید دقت داشته باشید که وزن ربات شما سنگین نشود .
دراین مرحله چون تعادل ربات حفظ نمی شود باید یک چرخ برای قسمت انتهای آن بسازیم که مطابق شکل زیراین کار راانجام می دهیم .
در مرحله ی بعد قسنتهای دیگر را نیز مطابق شکل لحیم کاری می کنیم
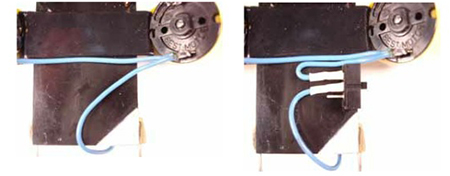
در این مرحله حتما متوجه کمبود اتصال و جریان برای موتورها شده اید !!
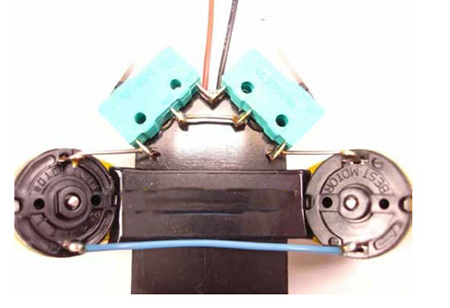
سیمهای باطری به تاچ سنسورها متصل می شوند پس موتورها برای دریافت جریان باید با سیم سومی که در تصویر به رنگ آبی میبینیدبه باطری مطابق شکل وصل می شون
حالا نوبت به اتصال سیمهای باطری میرسد که مطابق شکل انها رانیز به تاچ سنسورها متصل می کنیم،در این تصویر سیم قرمز ،مثبت باطری وسیم مشکی منفی باطری است ، در این مورد دقت شود
ربات تقریبا اماده است ولی برای فشرده شدن کلید تاچ سنسور باید اندازه ی کلید های آن یا همان سنسورهای حساس به برخورد بلند تر شود که این کار را با استفاده از چند فیش معمولی و سیم انجام می دهیم.

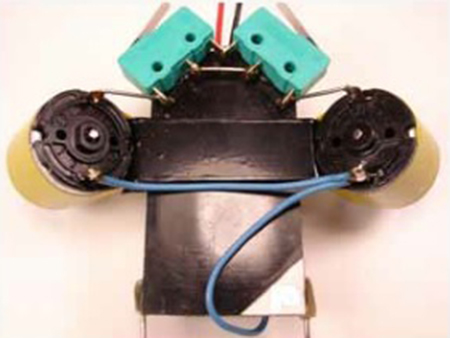
حالا شکل کلی ربات بصورت زیر است:.
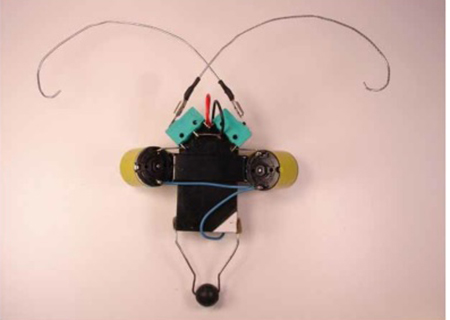
بهتر است که یک کلید هم برای روشن و خاموش شدن ربات قرار دهیم که انرا مطابق شکل در قسمت سیم رابط موتورها وباطری قرار می دهیم
ربات شما آماده شده است
به شما برای ساخت این ربات تبریک می گویم
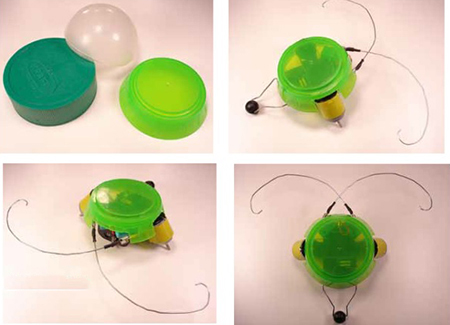
اگر از ظاهر رباتتان خوشتان نمی آید می توانید با ابزار خیلی ساده انرا زیبا سازی کنید .
پوریا قاسمی
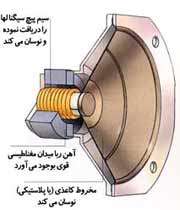
میکروفون :
امواج صوتی که به میکروفون برخورد می کنند باعث می شوند سیم پیچ در میدان آهن ربا به لرزش در آید. بدین ترتیب، سیگنال الکتریکی در سیم پیچ تولید می کند، به طوری که جریان آن همانند نوسانات امواج صوتی تغییر می کند.امیدوارم لذت ببرید...*****بایرام مبارک اولسون*****


امواج صوتی وقتی به سیگنال های الکتریکی تبدیل شدند می توان آنها را برای مصارف مختلف به کار برد. در تصویر زیر سیگنال الکتریکی ابتدا تقویت شده و سپس بر روی نوار ضبط می شود.

در مدلسازی زیر شکل ظاهری یک بلندگو را میبینید. اگر بخواهید میتوانید بر روی (فشار دهید) کلیک کنید و اجزاء داخلی آن را نیز ببینید.
میکروفون ها بر چهار نوع اند :
میکروفون زغالی(دانه زغالی) :

در میکروفون زغالی تغییرات فشار صوت از طریق دیافراگم به مجموعه ای از دانه های زغال وارد شده و در نتیجه تغییر مقاومت حاصل می شود و این تغییرات مقاومت باعث تغییرات جریان در مدار می گردد و به این ترتیب تغییرات فشار صوت به جریان الکتریکی تبدیل می گردد .

کریستال جسمی است که اگر تحت فشار قرار گیرد در دو سرش ولتاژ تولید می کردد . بنا براین جابجایی دیافراگم و فشار آن بر روی کریستال باعث تبدیل امواج صوتی به امواج الکتریکی از نوع ولتاژ می گردد .میکروفون کریستالی دارای امپدانس بسیار بالایی هستند بنابراین باید به تقویت کننده ای وصل شوند که دارای امپدانس ورودی زیاد (حداقل 2 مگا اهم ) باشد .
میکروفون های سیم پیچ متحرک :

میکروفون خازنی :

میکروفونی است که در آن یک خازن وجود دارد ،یکی از صفحه های خازن به دیافراگم وصفحه دیگر آن ثابت است . صفحه متحرک توسط ارتعاش دیافراگم جابجا می شود در نتیحه ظرفیت خازن متناسب با تغییرات دیافراگم تغییر می کند .لازم به ذکر است که برای ضبط شدای افراد از میکرو فون های با سیم ، میکرو فون های بی سیم ، میکرو فون های گیره ای ، میکرو فون های گردنی استفاده نمو د.
بلندگو :
امواج صوتی در محدوده فرکانس 20هرتز تا 20 کیلو هرتز قرار دارد که تک بلندگو نمی تواند همه این امواج را پخش کند برای حفظ کارایی دیافراگم در گستره فرکانس صوتی ، بلند گوهای چند واحدی ساخته می شوند ، که در آن ها طیف فرکانسی به دو ، سه و یا چهار باند فرکانسی تقسیم می شوند وهر ین از این باند ها با بلندگوی جداگانه ای که برای آن باند خاص طراحی شده است پخش می گردد .
بلندگوهای مخروی بزرگ برای پخش فر کانس های پایین تر (صوت های بم) ، بلندگوهای مخروطی متوسط برای پخش باند فرکانسی متوسط و بلندگوهای با دیافراگم کوچک تخت یا مخروطی برای پخش باند فرکانسی بالا بکار می روند .
طریقه تست بلند گو :
به چندین روش می توان بلندگو را تست کرد :
اگر سیم پیچ بلند گو سالم باشد عموما بلندگو سالم است با این حال با تزریق ولتاژ کم لحظه ای که می تواند توسط اهم متر یا منبع دی سی باشد صدای تق از آن صادر می شود .همچنین با تزریق یک ولتاژ ای سی با فرکانس صوتی حدودا یک کیلو هرتز در صورت سالم بودن از آن صوت صادر می شود .
کمپانی هانسون رباتیک در حال نمایش ربات پسر انسان*نمای جدید خود است که به مجموعه Robokind ربات*های این شرکت تعلق دارد.
فناوری جدید نسخه جدید ربات پسر کارتون*مانند Zeno است اما این بار ربات جدید با آرایه*یی از ژست*ها و حرکات چشم بسیار انسان*نماتر است. این ربات پسر مانند که در چین طراحی شده، 27 اینچ بلندی دارد.
مهم*ترین مشخصه Zeno جدید سر آن است که از آن*چه دیوید هانسون طراح آن Frubber می*خواند، ساخته شده است.
این ماده همان*طور که از نام آن برمی*آید (ترکیب گوشت و پلاستیک) نوعی پلیمر ارتجاع*پذیر اسفنجی ساختاربندی شده است، که می*تواند حرکات صورت را تقلید کند و درست مانند پوست انسان منقبض و باز شود. از این ماده همچنین به عنوان پلیمر زیست تقلید یاد می*شود. همچنین بیان چشم*ها و پلک*های متحرک ربات نیز در کیفیت زندگی*گونه آن نقش دارند.
هانسون این فناوری را مجهز به یک جفت دوربین با تعریف بالا برای تشخیص چهره و یک رایانه درونی و هوش مصنوعی پیشرفته کرده است.
بدنه ربات همچنین دارای 37 درجه حرکت است که این بالاترین میزان ربات طراحی شده توسط شرکت سازنده تلقی می*شود.
خواهر این پسر با نام Alice نیز به زودی ارائه خواهد شد. همچنین "پسرعمه و دخترعمه*های" کوچک*تر این "پسر" با قیمت ارزان*تر ظرف یک سال آینده خواهد بود. این ربات*های کوچک*تر راهی برای دسترسی این کمپانی به بازار انبوه عنوان شده*اند.
هانسون در نمایشی تصویری از ربات مزبور در تلاش برای جذب سرمایه*داران با هدف بازاریابی برای آن است.
ربات*های انسان*نما رویکردی برای تفحص در مرزهای زیست*شناسی، علوم شناختی و مهندسی هستند.
****آسیمو****
آسیمویک روبات انساننما است که توسط شرکت هوندا ساخته شدهاست. آسیمو 130 سانتیمتر قد و 54 کیلوگرم وزن دارد و میتواند بر روی دو پا با حداکثر سرعت 6 کیلومتر بر ساعت (4?3 متر بر ثانیه) بدود.آسیمو توانایی خواندن (ترجمه) حرکات و حالات چهره? انسانها را دارد و میتواند مستقلاً پاسخ دهد.
در حال حاضر 45 واحد آسمیو در جهان وجود دارد. تولید هر یک از این واحدها 638?186 یورو هزینه دارد.
آسیمو در تحقیقات و توسعه هوندا، «مرکز تحقیقات بنیادی تکنیکی واکو»، در ژاپن ساخته شده است.

در داخل سر آسیمو 3 میکروفون جاسازی شدهاست که به آسیمو امکان دریافت پیامهای صوتی و همچنین امکان تشخیص جهت صدا را میدهد.
آسیمو محیط اطراف خود را با دو دوربین میبیند. به واسطه این دوربینها آسیمو توانایی تشخیص عمق و فاصله را نیز دارد. چشمان آسیمو در محلی قرار گرفتهاند که هم سطح چشمان یک انسان بالغ در هنگام نشستن بر روی صندلی باشند.
5 حسگر فراصوت در پائین کولهپشتی آسیمو تعبیه شده است. این حسگرها آسیمو را قادر میسازد که اجسام ثابت یا متحرک را در کنارهها و پشت خود تا فاصله? 3 متری تشخیص دهد.
باتری لیتیوم-یون 51?8 ولت، که در پشت آسیمو قرار گرفته او را قادر میسازد که با 4 ساعت شارژ یک ساعت فعالیت کند.
حسگر فراصوتی، لیزرهایفروسرخ و دوربینهایی که در قسمت میانی بدن آسیمو قرار دارند با تشخیص اشیا تا فاصله 3 متری به او کمک میکنند تا به راحتی در محیط حرکت کند.
آسیمو تنها روبات انساننما است که میتواند مستقل و بدون کمک از پله بالا و پائین رود.[3]
اندازه آسیمو به گونهای در نظر گرفته شده است که به راحتی بتواند در محیط زندگی انسان به فعالیت بپردازد.

در پایان این آموزش قادر خواهید تا با استفاده از آردوینو یک ربات تعقیب خط بسازید. با ما همراه باشید.
این ربات از یک الگوریتم کنترل PID استفاده می کند که به طور همزمان می تواند خطوط مشکی روی زمینه سفید را دنبال کند. در این ربات آرایه ای از هشت سنسور انعکاسی مادون قرمز (IR reflectance sensors) مورد استفاده قرار گرفته است که مکان ربات را روی خط تعیین می کنند و همچنین از یک میکروکنترلر آردوینو نانو استفاده شده است که عملکرد مناسب برای نگه داشتن ربات روی خط را محاسبه می کند.
گام اول: ابزار و قطعات مورد نیاز
| آردوینو نانو | × | 1 |
| بردبورد 400 نقطه (400 point) | × | 1 |
| بردبورد 170 نقطه (170 point ) | × | 1 |
| تنظیم کننده ولتاژ 5 ولت | × | 1 |
| کنترلر موتور دوگانه | × | 1 |
| سیم جامپر برد بورد | × | 1 |
| محفظه باتری لیتیومی دو تایی | × | 1 |
| موتور گیربکس دوقلو | × | 1 |
| آرایه سنسور انعکاسی مادون قرمز | × | 1 |
| باتری لیتیومی 3.7 ولت 18650 | × | 2 |
| چرخ | × | 2 |
| چرخ کاستور | × | 2 |
| سیم لخت کن | × | 1 |
| ورق آکریلیک 1.8" | × | 1 |
| برش لیزری یا ابزار مشابه برش CNC | × | 1 |
در صورت عدم دسترسی به ابزارهای برش CNC، ابزارهای برش دستی نیز مناسب هستند.




گام دوم : آردوینو

بورد های آردوینو میکروکنترلرهای ساده ای هستند که اهمیت زیادی برای دانش آموزان و دانشجویان مهندسی دارند. نوشتن کد در آردوینو IDE کار ساده ای است که در صورت نیاز به کمک می توانید از انواع آموزش ها، انجمن ها و افرادی که بتوانند به شما کمک کنند، بهره مند شوید. در این پروژه از یک آردوینو نانو استفاده شده است ، اما شما می توانید در صورت تمایل از هر بورد دیگری که دارای 8 ورودی آنالوگ، 4 خروجی PWM و یک پین دیجیتال اضافی است، استفاده کنید. آردوینو نانو بسیار مناسب است چون می توانید بدون استفاده از سیم های جامپر، به صورت مستقیم آن را داخل بردبورد قرار دهید. آردوینو مانند مغز ربات عمل می کند و بر اساس اطلاعاتی که از سنسورها دریافت می کند تصمیم گیری می کند.
گام سوم: اسکلت ربات
اسکلت، بدنه ی فیزیکی ربات است. از یک برش دهنده ی لیزری برای برش دادن قطعات اسکلت ربات استفاده کنید، البته به صورت دستی نیز می توان این برش ها را انجام داد. برای برش دهنده های لیزری یا دیگر ابزارهای CNC از فایل ai و dxf و drwاستفاده کنید و برای برش دستی از فایل pdf dimensioned استفاده کنید. برچسب سوراخ ها در فایل pdf به دستورالعمل های ساخت بدنه که در زیر آمده است، اشاره دارد.
بعد از برش قطعات بالایی و پایینی بدنه، توپ های کاستر را با استفاده از سوراخ های A5 ، A6 ، A7 و A8 نصب کنید.
سپس با استفاده از سوراخ های B1 ، B2 ، B3 و B4 گیربکس را نصب کنید. شما تنها به دو سوراخ نیاز دارید، اما جعبه دنده، دو مجموعه متفاوت از دنده ها است که شما می توانید برای تغییر سرعت، تغییرش دهید.
اگر آنها را تغییر دهید در واقع مکان چرخ ها را تغییر داده اید و باید موقعیت جعبه دنده را نیز تغییر دهید. راهنمای مونتاژ گیربکس و تغییر نسب دنده ها داخل گیربکس وجود دارند.
در مرحله ی بعد با استفاده از سوراخ هایD1 ، D2 ، D3 و D4 قسمت بالایی و پایینی اسکلت را به هم وصل کنید. به منظور اطمینان در سرعت های بیشتر برای اتصال دو نیمه شاسی از استندآف های (standoff) بلند 1.25" استفاده کنید.
برای نگه داشتن باتری از سوراخهای C1 و C2 استفاده کنید. در اینجا از دو باتری قابل شارژ لیتیومی 3.7 ولت 18650 ضد حریق استفاده شده است که به صورت سری قرار گرفته اند ، بنابراین ولتاژ خروجی کل معادل 7.4 ولت خواهد بود. شما می توانید از منبع تغذیه دیگری نیز استفاده کنید، مثلا یک باتری 9 ولتی، اما ظرفیت آنها حدود 950 mAh است در حالی که باتری های لیتیومی حدود 3000 mAh هستند.
بردبوردها با استفاده از چسب دو طرفه و نوار چسب در قسمت بالایی اسکلت ربات نصب می شوند. میتوانید برای نگه داشتن بردبورد از چسبهای قوی استفاده کنید، اما این کار استفاده از بردبورد را در پروژه های دیگر غیرممکن می سازد.
برای نصب سنسورها از سوراخ های A1 ، A2 ، A3 و A4 استفاده می شود که در مرحله ی بعد بحث می شود.
گام چهارم: آرایه سنسورها


آرایه سنسورها به عنوان چشم های ربات عمل می کنند. هشت سنسور بر روی قسمت جلویی ربات وجود دارد که می تواند سیاه را از سفید تشخیص دهند. بر اساس اینکه کدامیک از سنسورها سیاه را می بیننند و کدامیک سفید را می بینند ، آردوینو می تواند مسیر ربات را بر روی خط پیدا کند. اگر ربات کاملا بر روی خط سیاه باقی بماند، در چرخش های 90 درجه نمی تواند راست را از چپ تشخیص دهد، به همین دلیل به گونه ای برنامه ریزی شده است که روی لبه خط باقی بماند.
آرایه سنسور با استفاده از پیچ های #2-56 روی دو ورق آکریلیک سوار شده است. برای این قسمت فایل هایی ضمیمه شده است.
پین های سنسور از 1 تا 8 شماره گذاری شده اند و باید به پین های آنالوگ متناظر روی آردوینو که از A0 تا A7 نام گذاری شده اند، متصل شوند. پین VCC به 5V و پین GND به زمین وصل می شود. دیاگرام کلی مدار در قسمت بعد شرح داده شده است.
گام پنجم: دیاگرام مدار

اتصال سنسورها در مقایسه با سیم پیچی دیاگرام که در بالا به آن اشاره شد، فرآیند ساده ای است. تمام سیم های قرمز نشان دهنده ی قدرت یا ولتاژ مثبت هستند، سیم های قرمز تیره ولتاژ پایین و قرمز روشن ولتاژ بالا را نشان می دهند.
سوییچ 1 سیستم را روشن کرده و ولتاژ مورد نیاز را از بسته باتری که به پین خارجی سوییچ متصل است به پین مرکزی سوییچ رسانده و از آنجا به VCC In (پین 4) رگولاتور ولتاژ می برد.
VCC-out (پین 1) بر روی رگولاتور، ولتاژ کمی را به بورد می فرستد تا ولتاژ بقیه مدار را تامین کند، در حالیکه بسته باتری تامین کننده ولتاژ برای زمین است. سوییچ 2 تعیین می کند که آیا ماشین در حالت خودکار است یا حالت دستی. ولتاژ این سوییچ از رگولاتور و زمین تامین می شود. پین مرکزی بر روی سوییچ 2 به پین D4 بر روی آردوینو نانو متصل می شود تا با مد ارتباط برقرار کند.
کنترل کننده موتور با پین های 1 و 16 بورد تغذیه می شود. قدرت به پین 2 ارسال می شود و سیم های قدرت از موتور 1 و 2 متناظرا به پین 3 و 5 متصل می شوند. زمین هر موتور متناظرا به پین های 4 و 6 متصل می شوند. کنترل کننده موتور سیگنال خود را از پین های D9، D6 ، D5 و D3 آردوینو که متناظرا به پین های 11، 12، 13 و 14متصل شده اند، دریافت می کند.
آردوینو بر اساس سیگنال هایی که از آرایه بورد (array board) دریافت کرده، دستوراتی را به کنترل کننده می دهد. هر LED مادون قرمز از طریق پین های آنالوگ یک سیگنال بازگشتی به آردوینو می فرستند. پین های 1، 2، 3، 4، 5، 6، 7 و 8 آرایه LED متناظرا به پین های A0، A1 ، A2 ، A3 ، A4 ، A5 ، A6 و A7 آنالوگ متصل می شوند.
گام ششم: کد
کد زیر در واقع با توجه به سنسورهای IR و خواندن مقادیر از آن ها به موتورها فرمان می دهد که با چه سرعتی حرکت کنند تا ربات به سمت دلخواه بچرخد. این ربات دارای 8 سنسور است. اگر فرض کنیم ربات همواره در یک طرف خط قرار دارد در این صورت در هر زمان ربات می تواند در یکی از 9 موقعیت از 0 تا 8 باشد که با توجه به اینکه کدامیک از سنسورها روشن هستند این موقعیت مشخص می شود. ما می خواهیم در هر زمان مرکز ربات روی لبه خط سیاه قرار گیرد بنابراین setpoint را روی عدد 4 تنظیم می کنیم که در واقع فاصله بین سنسور چهارم و پنجم می باشد. کنترلر PID به این صورت عمل می کند که یک مقدار مطلوب را در نظر گرفته و با توجه به مقدار فعلی و تفاوت آن با مقدار مطلوب، که آن را خطا می نامیم عملکرد مناسب را نشان می دهد.
در این حالت خطا برابر است با تفاضل setpoint از موقعیت مکانی ربات. حال باید ثابت های KP و Kd را که به آن ها ثایت های تناسبی و مشتقی گفته می شود بیابیم.
برای محاسبه ترم تناسبی کنترلر PID ، باید تفاضل PWM بیت دو موتور را بر واحد خطا تقسیم کرده و در در خود خطا ضرب نماییم. ترم مشتقی این کنترلر نیز با ضرب کردن ضریب مشتقی Kd در تغییرات خطا محاسبه می گردد.
و سپس این دو ترم با هم جمع شده و فرمان کنترل را صادر می نمایند.
کد نوشته شده در زیر این مراحل را انجام می دهد. این کد را کپی کرده و در نرم افزار آردوینوی خود پیست نمایید.
#define NUM_SENSORS 8
#define avgSpeed 255
int leftWheelf=3;
int leftWheelr = 5;
int rightWheelf=6;
int rightWheelr = 9;
int setpoint=4, val;
unsigned long lastTime=0, timeChange=0;
int Sampletime=20, outMax=255, outMin=-255;
float error,sumerr,lastError,output,ITerm,DTerm;
float Kp=avgSpeed/4, Ki=0, Kd=.25*Kp;
int pos;
unsigned int sensor[]={A0,A1,A2,A3,A4,A5,A6,A7};
unsigned int sensorValue[NUM_SENSORS];
int threshold = 200;
byte incomingByte;
int bias=5;
void setup() {
Serial.begin(115200);
pinMode(4,INPUT);
}
void loop() {
// Serial.println(digitalRead(4));
if (digitalRead(4)== true) {
unsigned int Wsum=0;
int sum=0;
for (int i=0;i<NUM_SENSORS;i++) {
sensorValue[i]=analogRead(sensor[i]);
if (sensorValue[i] < threshold) sensorValue[i]=1;
else sensorValue[i]=0;
//Serial.print(i); Serial.print(": "); Serial.println(sensorValue[i]);
//delay(250);
}
for (int i=0;i<NUM_SENSORS;i++) {
sum=sensorValue[i]+sum;
pos=sum;
}
// Serial.println(pos);
//delay(100);
timeChange = millis()-lastTime;
if (timeChange >= Sampletime){
pid(pos);
}
}
else {
if (Serial.available() > 0) {
incomingByte = Serial.read();
}
if (incomingByte == "w") {
forward();
}
else if (incomingByte == "s") {
reverse();
}
else if (incomingByte == "d") {
rightTurn();
}
else if (incomingByte == "a") {
leftTurn();
}
else {
brake();
}
}
}
void pid (int val) {
error=setpoint-val;
ITerm+=(Ki*error);
DTerm=Kd*(error-lastError)/(Sampletime/1000.0);
lastError=error;
if(ITerm > outMax) ITerm=outMax;
else if (ITerm < outMin) ITerm=outMin;
output=Kp*error+ITerm+DTerm;
if (output>outMax) output=outMax;
else if (output<outMin) output=outMin;
lastTime=millis();
Serial.println(val);
if (output>0) {
analogWrite(leftWheelf,avgSpeed);
analogWrite(rightWheelf,avgSpeed);
analogWrite(leftWheelr,abs(output));
analogWrite(rightWheelr,0);
}
else if (output<0) {
analogWrite(leftWheelf,avgSpeed);
analogWrite(rightWheelf,avgSpeed);
analogWrite(leftWheelr,0);
analogWrite(rightWheelr,abs(output));
}
else {
analogWrite(leftWheelf,avgSpeed);
analogWrite(rightWheelf,avgSpeed);
analogWrite(leftWheelr,0);
analogWrite(rightWheelr,0);
}
}
void forward() {
analogWrite(leftWheelf, avgSpeed - bias);
analogWrite(leftWheelr, 0);
analogWrite(rightWheelr, 0);
analogWrite(rightWheelf, avgSpeed);
}
void leftTurn() {
analogWrite(leftWheelf,0);
analogWrite(leftWheelr, 0);
analogWrite(rightWheelr,0);
analogWrite(rightWheelf, avgSpeed);
}
void rightTurn() {
analogWrite(leftWheelf,avgSpeed);
analogWrite(leftWheelr, 0);
analogWrite(rightWheelr,0);
analogWrite(rightWheelf, 0);
}
void reverse() {
analogWrite(leftWheelf, 0);
analogWrite(leftWheelr, avgSpeed-bias);
analogWrite(rightWheelr, avgSpeed);
analogWrite(rightWheelf, 0);
}
void brake() {
analogWrite(leftWheelf, 0);
analogWrite(leftWheelr, 0);
analogWrite(rightWheelr, 0);
analogWrite(rightWheelf, 0);
}
گام هفتم: کنترل از راه دور

اگر دوست دارید ربات را به صورت دستی و از راه دور کنترل کنید، به یک آداپتور بلوتوث نیاز دارید.
اگر GND را به زمین، Vin را به +5 ولت، Tx را به پین 0 روی آردوینو و Rx را به پین 1 روی آردوینو وصل کنید، می توانید کامپیوتر خود را با آردینو تان جفت کنید. این کار درست مانند یک ارتباط سریال است که می توانید از آن برای آپلود اسکریپ یا ارسال اطلاعات استفاده کنید. کد اسکریپ زیر به شما اجازه میدهد تا ربات را با استفاده از کلیدهای WASD کنترل کنید.
// Click on the image to give it focus,
// and then press any key.
import processing.serial.*;
int value = 0;
String word = " ";
String mode = " ";
boolean auto = false;
Serial myPort;
void setup() {
size(300, 90); // size always goes first!
String portName = Serial.list() [0];
myPort = new Serial(this, portName, 115200);
}
void draw() {
background(0);
myPort.write(key);
if (auto) {
mode = " AUTO ";
word = " ";
}
else {
mode = "MANUAL";
}
fill(255);
textSize(40);
textAlign(CENTER);
text(mode, width/2, 40);
textAlign(CENTER);
text(word, width/2, 80);
}
void keyPressed() {
if (key == " ") {
auto = !auto;
}
if (!auto) {
if (key == "w") {
word = "FORWARD";
}
else if (key == "d") {
word = " RIGHT ";
}
else if (key == "a") {
word = " LEFT ";
}
else if (key == "s") {
word = "REVERSE";
}
else {key = "p";}
}
}
void keyReleased() {
key = "p";
}
مهندسی رباتیک (به انگلیسی: Robotics engineering) یک برنامه آموزشی با دید تخصصی به رباتیک شامل آموزش زمینههایی از مهندسی برق، کامپیوتر و مکانیک است که در ساخت و استفاده از رباتها مورد نیاز هستند.
هدف از رشته رباتیک تجمیع تحقیقات رباتیک است که در حال حاضر در دپارتمانهای مختلف انجام میشود. دانشجویان این رشته باید بتوانند نقش موثری در توسعه تکنولوژیهای مربوط به رباتیک داشته باشند. این رشته بر پایه دروس علمی و تحقیقات عملی پایه ریزی میشود که در آزمایشگاه رباتیک و تحت نظارت اساتید انجام خواهند شد.
پیش بینی میشود که رباتیک یکی از 10 صنعت برتر آینده باشد. کاربرد محصولات رباتیک از محدوده کارخانجات فراتر رفته و در حال تسری به کاربردهای روزمره است. توسعه و تحقیق در مورد کاربردهای جدید نیازمند توجه ویژه به این رشته و تربیت مهندسین خلاق و متخصص است. از طرفی در چند سال گذشته فعالیتهای چشمگیری در زمینه رباتیک در بین دانش آموزان و دانشجویان صورت پذیرفته که باعث بوجود آمدن طیف وسیعی از علاقهمندان به این رشته گردیده که مشتاق ادامه فعالیتهای آکادمیک در این زمینه هستند. با ایجاد رشته رباتیک میتوان به نیازهای صنعتی و اجتماعی همزمان پاسخ داد.
تجربه فعالیتهای رباتیکی کشور نشان داده است که دانش آموختگان رشته رباتیک به علت ماهیت بین رشتهای و فعالیت تیمی مورد نیاز این رشته، توانایی مهندسی بسیار زیادی کسب کرده و قادرند در تمام صنایعی که نیازمند اتونوموس و طراحی ماشین آلات صنعتی هستند به خوبی ایفای نقش نموده و در پروژههای صنعتی بزرگ شرکت و یا آن را با موفقیت رهبری نمایند.
****** معرفی رباتیک ******

رشته فنی مهندسی رباتیک یکی از رشته های میان رسته ای جدید در ایران میباشد ،جدید بودنش میتواند بدلیل تاسیس در حد اکثر 15 سال گذشته باشد و میان رشته ای است به دلیل اشتراکاتی که با رشته های مهندسی برق گرایشات الکترونیک و کنترل و همچنین مهندسی مکانیک گرایش طراحی جامدات و مهندسی کامپیوتر گرایش نرم افزاردارد.
گاهی اوقات حتی افراد تحصیل کرده نیز به اشتباه ،گمان میبرندمهندس رباتیک ،مهندس برق نیز می باشد علاوه بر این مکانیک و کامپوتر نیز هست،در صورتی که برای دانشجوبان رباتیک واضح بودن این اشتباه غیر قابل انکار است که بقیه رشته ها یک مهندس رباتیک تنها یک مهندس رباتیک است.
چرا که به صرف ارائه دروسی چون مداراهای الکترونیکی و منطقی و ریز پردازنده در برنامه درسی مهندسی کامپیوتر-نرم افزار و اشتراک این دروس در رباتیک و مهندسی الکترونیک ،نمیتوان نسبتی از الکترونیک و رباتیک به کامپیوتر داد.وظیفه و کربرد ها متفاوت است.شاید یکی از نمونه های فریبنده آگهی های استخدام کار شرکتها یا کارخانه ها باشد که آنهم بدلیل کاربرد مورد انتظار آنها،نام چند رشته مهندسی را در کنار یکدیگر قرار میدهند.
به عبارتی این دیگر بستگی به نیاز صنعت و کارخانه ها دارد که بسته به نیازشان ، رشته های دانشگاه تاسیس شده اند، رشته رباتیک نیز از این اصل مستثنا نیست .
یک مهندس رباتیک حتی با وجود توانایی در برخی از موارد اختصاصی موجود در دیگر رشته ها،تنها یک مهندس رباتیک استاین اصل را میتوان برای دیگر رشته های فنی مهندسی تعمیم داد.
رشته های جدید برای نیاز های جدید و پاسخ به آنها طراحی شده اند وبه طبع آن توانایی افراد تحصیل کرده نیز بهترین پاسخ برای این نیازها میباشد که رشته رباتیک نیز پاسخگو به نیاز رباتیکی صنعت میباشد.
گرایشهای این رشته در مقطع کارشناسی ارشد،در ایران مکاترونیک میباشد و البته خود رباتیک که در ایران هنوز وجود ندارد.
ارتباط رشته رباتیک با دیگر رشته ها
در حقیقت اگر یک مهندس رباتیک قصد نو آوری و ایجاد یک تکنولوژی را در سر بپروراند و برای مثال طرح یک ربات فوتبالسیت آدم واره را بریزد ملزوم به استفاده از دروسی که قبلا ً ،فراگرفته و یا تکمیل آنها میباشد به عبارتی باید در برنامه نویسی و تنظیم الگوریتم بهینه ،طراحی مدارهای الکتریکی و الکترونیکی مورد نیاز، طراحی مکانیزم عالی و ی نقص و کار امد در ایجاد تعادل پویا مهارت کافی داشته باشد.
به خصوص در زمینه طراحی کامیپوتری مدارها ، اجزاء و از همه مهمتر برنامه نویسی در سطح بالای قرار داشته باشد تا این نیازها را برطرف کند.
بر فرض برای طراحی یک ربات آی کاوشگر باید با روشهای عایق بندی آشنا باشد و یا در یک ربات پرنده با طراحی سیستم آئرودینامیکی تا حدودی آشنایی داشته باشدو یا در تولید و ساخت ربات جنگنده، آشنا به موارد مختلف و ویژگی های مختلف آنها مثل استحکام و سبک وزنی یا انعطاف و سختی و دیگر مورد این چنینی باشد.
البته مثل دیگر رشته های میان رشته ای ارتباط های زیادی میتوان با دیگر علوم و فنون پیدا کرد که موارد فوق مربوط به رباتیک بودند که به نظر من این ارتباطات در این رشته بیشتر از دیگر رشته هاست.
صنعت رباتیک
امروزه استفاده از رباتها واتوماسیون غیر قابل انکار و معرفی شده برای تمام صنایع و کارخانه ها میباشد به طوری که کارخانه ها روز به روز به این سمت روی می آورند دلیلش هم مشخص است زیرا بازده ای بهتر و سرعت دقت کم هزینه بودن دیگر خصوصیات مورد انتظار را به ارمغان میآورد.
رباتها اولین بار در سال 1954 در صنعت به کارگرفته شدند که یک بازوی ربات یا Manipulator نام داشت که تنها 3 درجه آزادی بود.رباتهای صنعتی امروزی اکثراً همان بازوی رباتیکی هستند ولی با 6 درجه آزادی و خیلی پیشرفته تر نبست به گذشته کار میکنند رباتها در صنعت به شیوه ها و روشها و مدلهای مختلفی به کارگرفته میشوند. اما متاسفانه همانطور که خودتان میدانید، به جرات میتوان گفت ارتباط بین دانشگاه و صنعت در ایران خیلی کم و گاهی در حد صفر میباشد و این وجود دانشگاه را زیر سوال میبرد ،چرا که، اگر صنعت ،تشنه علم و نوآوری نبود پس چرا عده های به نام دانشجو به تحصیل علم میپردازند؟
گستردگی علم رباتیک
همان طور که در ارتباط این رشته با دیگر رشته ها ذکر شد برای فعالیت و نوآوری و تحقیق و پیشرفت به جرات میتوان گفت یکی از وسیع ترین شاخه های فنی مهندسی،رشته مهندسی رباتیک میباشد.
برای مثال رباتی را معرفی میکنم که ارتباط بسیار کمی با رشته های فنی مهندسی و علوم پایه دارد،ربات جراح تحت فرمان پزشک جراح در اتاق عمل با حضور مستقیم پزشک و یا غیر مستقیم و با کمک اینترنت ،نمودی از پیشرفت این رشته است که بسیار مفید و حیاتی میباشد.تصور کنید رباتی را که شما طراحی کرده اید وسیله ای برای نجات یک بیمارو بهبودی وی شده است که قطعاَ لذت موفقیت آنفخستگی زحمتتان را از بین میبرد.
نمونه ی بارز دیگر گستردگی علم رباتیک، که بسیار مورد توجه کشورهای مختلف مثل ژاپن،کره،آمریکا و ایران و چند کشور دیگر میباشد،رباتهایامداد و نجات هستنند که یاری رسان گروه امداد در حوادث غیر قابل پیش بینی میباشد.به هر حال این گرایش از رباتیک آن قدر اهمیت داشته است که مسابقاتی تحت عنوان شبیه سازی امداد و نجات در روبوکاپ برگزار میگردد.
وظیفه اصلی رباتهای امداد رسان پیدا کردن مصدومین و اعلام مکان آنها به سرور میباشد.
رباتها در پروژه های JPL شرکت فضایی NASA نقش مهمی دارند از جمله آنها Spriteو Sojourner می باشد.این نیز استفاده دیگری از رباتیک میباشد .
مصارف رباتها در همه ابعاد زندگی انسان به سرعت در حال گسترش است تا کارهای سخت و خطرناک را به جای انسان انجام دهند مثل بررسی وضعیت داخلی راکتورها هسته ای که یک ربات هیچ گاه تحت تاثیر تشعشعات رادیو اکتیو قرار نمیگیرد و این یک جایگزینی خوب و مفید رباتها میباشد.
نیاز کارخانه ها و صنایع جهان و آینده شغلی
در ابتدا باید ذکر کنم که بازار شغلی این رشته در ایران اشباع نشده است چرا که تا این لحظه هیچ مهندس رباتیکی فارغ التحصیل نشده است (در ایران)، که احتمالا ً تا ماه دیگراولین فارغ التحصیل این رشته وارد جامعه شود و به امید خدا ،اکثراً جذب کارخانه ها خواهند شد زیرا هزینه یک مهندس رباتیک ایرانی خیلی پایین تر از و به صرفه تر از خارجی میباشد و یا استخدام چند مهندس مختلف نیز هزینه بر است و یا افراد توانا در بر طرف کردن نیازهای رباتیکی کارخانه ها نیز که خیلی خیلی کم هستنند ، دستمزد بالا دریافت کرده و شاید به اندازه یک فارغ التحصیل این رشته نیز مهارت کافی و مطالعه و توانایی نداشته باشند.
کارخانه های دارای ربات های صنعتی وخطوط اتوماسیون و به خصوص بازوهای رباتیک اولین کارخانه ها در چذب نیروی پرسنلی در این رشته اند و در اولویت اول این کارخانه ها مربوط به صنایع ماشین سازی و سپس شرکت های تولید کننده تراشه های سیلیکونی والکترونیکی میباشند ،از جمله این کارخانه ها در ایران که دارای خطوط اتوماسیون و یا بازوهای رباتی و یا دیگر رباتهای صنعتی هستند، میتوان نام برد به شرح زیر است: کارخانه ماشین سازی ایران خودرو،ماشین سازی سایپا،کاشی سمنان،کاشی یزد،تراکتور سازی تبریز،کیش خودرو،رب تبرک،کنستانتره شاهرود و چندین کارخانه دیگر که اکثرا ماشین سازی هستنند را میتوان نام برد.
رباتیک و ربات در ایران
در زمینه تولید ربات هنوز کسی در ایران چیزی نشنیده است، مگر تعمیر و بازسازی رباتهای وارداتی تنها بخش ،ساخت ربات ،برای مسابقات رباتیک میماند که باید خدمتان عرض کنم تیم های ایرانی کم ترین حضور را دارند آنهم بدلیل هزینه قابل توجه ساخت میباشد که نبود حمایت دانشگاه ها چه مالی و چه هر چیز دیگری ،نبود پشتیبان تبلیغاتی که الته این مورد در حال حاضر به جرات میتوان گفت یکی از قویترین کشورها در مسابقات روبوکاپ در بخش شبیه سازی امداد و نجات و شبیه سازی فوتبال ،ایران میباشد.
شاید علت امتناع فعالان رباتیک در بخش های دیگر کم هزینه بودن این رشته باشد و متاسفانه علت آن در اکثر مواقع پولی است.جالب است بدانید در مسابقات برمن آلمان که 24 خرداد برگزار شد اکثر تیم های شرکت کننده در بخش شبیه سازی رباتهای امداد و نجات ایرانی بودند.به هر حال هرچه مشکل بزرگ باشد چه مالی و چه ... ، خدای ما بزرگتر است و ما را در استفتده از توانایی خودمان یاری میرساند. در مورد ایران البته با توجه به تمام مطالب بیان شده در مورد ایران جای امید واری است که اکثر کارخانه ها و صاحبان صنایع بر اساس دلایل مختلف مثل رقابت روز به روز به سمت استفاده از ربات روی آورده اند و این موضوع دلیلی بر وجود و حتی رشد بسیار چشم گیر بازار شغلی این رشته دارد.
چشم انداری از رباتیک
شهری را تصور کنید که رباتها در اکثر فعالیت های انسانی و بشری کمک رسان بشر شده اند.به یقین که نگاهی با کمی دورنگری و کمی بزرگ نمایی از آینده این رشته بسیار نگران کننده و شاید خطرناک باشد.تصور این که رباتی شما را در یک معمله بفریبد و یا رباتی که دارای احساس و اندیشه و جماعاتی رباتی که بر سر مسایل مورد نظر شان مثل کم توجهی به آنها شروع به شورش کنند و دیگر موارد که اکنون خنده دار و در باطن نگران کننده است.
ابته مفید بودن ساخته دست بشر در درجه اول قرار میگیرد در راستای همین مطالب بد نیست نگاهی با تامل و جدی به فیلم "مرد 200 ساله" بیاندازید که به تصور شما کمک میکند.
دانشگاه صنعتی شاهرود و رباتیک
در مهر ماه سال یک هزار و سیصد و هشتاد و یک در دانشگاه صنعتی شارود اولین پذیرش در رشته مهندسی رباتیک در مقطع کارشناسی اغاز شد. آغازی با انگیزه های فراوان دانشجویان و اساتید آن .آغازی با چشم اندازی چند ساله در کشور با هدیف تولید علم در این زمینه و پرورش دانشجویان در رشته رباتیک.
همانند تمام دانشگاه ها در ایران و خارج از ایران با تاسیس یک رشته در یک دانشگاه مخصوصا ً یک رشته میان رشته ای باشد قطعا دانشگاه با مشکلات مواجه خواهد شد که ابته تا کنون پیشرفت بسیار چشم گیری در حل مشکلات و افزایش سطح علمی آن شده است.
اما اگر مشکلی وجود نداشته باشد آیا کسی در جهت رفع مانع تلاش خواهد کرد که سبب از بین رفتن مشکلات بعدی و نتیجه پایانی پیشرفت و ارتقاسطح علمی بشود. به هر حال پیشرفت خوبی دیده میشود آینده روشنی در انتظار دانشجویان رباتیک دیده میشود.
از جمله برنامهای دانشگاه در راستای اهداف رباتیک را بدین شرح است.
کلاسهای مقدماتی رباتیک برای ورودی های هر سال که مدرسان آنها دانشجویان رباتیک هستند که در مسابقات مختلف رتبه میآورند.
کلاسهای پیشرفته رباتیک و کلاسهای پیشرفته الکترونیک که باز هم مدرسان رباتیکی دارد بر خلاف وجود دانشجویان ارشد الکترونیک کنترل قدرت و دکتری کنترل، جلسات هفتگی با محوریت رباتیک و موضوعات مربوطه و کلاسها و جلسات و برنامه های فوق برنامه دیگری که مدیریت اکثر آنها با رباتیکی هاست.لازم به ذکر است که دو اتاق یکی آزمایشگاه رباتیک و اتاق پروژه رباتیک که درب آن بر روی رباتیک ها برای طراحی و ساخت باز است.
.: Weblog Themes By Pichak :.