در این اموزش روش ساخت یک ربات کوچک و ساده بصورت گام به گام و تصویری آموزش داده شده که براحتی هم ساخته میشود ، شما می توانید اولین قدم در دنیای جالب رباتیک را با ساختن این ربات برداریداین یک ربات بسیار ساده است که می تواند روی زمین حرکت کرده و بابرخورد به هرمانع مسیر خودرا عوض کنداین ربات به هیچ ای سی و تراشه ای نیاز ندارد وخیلی ساده هم ساخته می شود.
چرا ساخت این ربات راحت است ؟
- بدون هیچ برنامه ریزی است
- از قطعات تخصصی تر مثل ای سی و تراشه های الکترونیکی در آن استفاده نشد ه است
این ربات چه کاری انجام می دهد؟
این ربات یک ربات ساده و مقدماتی است . به سمت جلو حرکت می کند و با برخورد شاخک های آن به هر مانع مسیرش را عوض
می کند تا از آن مانع بتواند عبور کند و با برخوردهای مختلف به موانع گوناگون مسیرش مرتبا عوض می شود.
توصیه های قابل توجه:
اگر نوجوان هستید یا کار با این وسایل و انجام برخی از مراحل (مثل لحیم کاری) برایتان مشکل است حتما از افراد حرفه ای تر و
با تجربه تر کمک بگیرید.
هنگام کار حتی الامکان از عینک ایمنی هم استفاده کنید.
سایر نکات ایمنی را رعایت کنید.
برای ساخت این ربات چه قطعاتی مورد نیاز است ؟
وسایل مورد نیاز را در شکل زیر می بینید

قطعاتی که شما نیاز دارید:
2عدد ارمیچر 1.5ولتی
تاچ سنسور2عدد
2عدد باتری1.5ولتی
جاباطری
چرخ کوچک که میتوانید از یک گوی توخالی هم استفاده کنید
گیره ی کاغذ
-سیم ، چسب ، و برخی وسایل جانبی که در طی مراحل کار با آنها آشنا می شوید
شروع به ساخت ربات می کنیم :
13قطعه سیم به اندزه 6سانتی متر برش می دهیم

یک بار دیگر تصویر کلی لوازم مورد نیاز را در تصویر زیر میبینید

ابتدا طبق تصویر زیر سیم ها را به قطعاتی که نشان داده شده لحیم کنید .

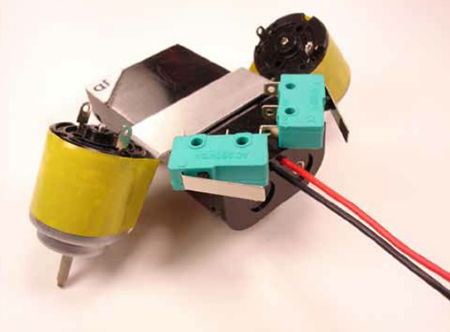
سنسور های تاچ یا همان سویچ ها را به قسمت صاف جاباطری با چسب محکم بچسبانید

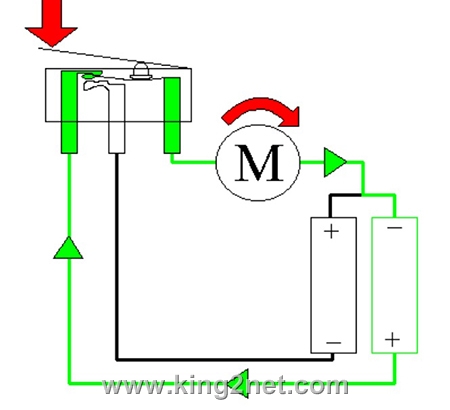
در اینجا لازمه که نحوه ی کار سنسور تاچ و استفاده ای که در این ربات از این سنسور را بهتر آشنا شوید . در تصاویر زیر کاملا واضح و مشخص نحوه ی کاراین قطعه در ربات نشان داده شده است.

و
در مرحله بعد موتورها را نیز با یک زاویه ی مناسب با کناره های جاباطری بچسبانید اگر این کار براحتی صورت نمی گیرد می توانید برای اتصال محکم تر و بهتر از یک نوار پلاستیکی مطابق شکل زیر استفاده کنید.

و

چگونه جهت حرکت ربات را تنظیم کنیم؟
جهت چرخش موتورها باید بصورتی باشد که ربات کوچک شما به سمت جلو حرکت کند با تنظیم درست سیم مثبت و منفی موتورهامی توانید به نتیجه ی درست برسید. امتحان کنید تا به حالت مطلوب دست پیدا کنید.
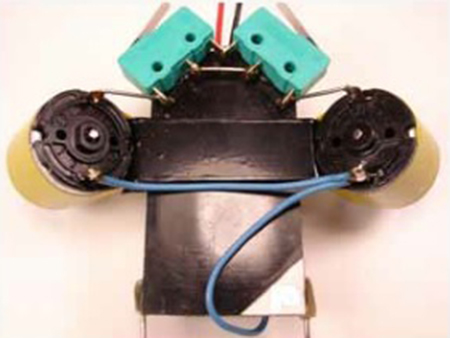
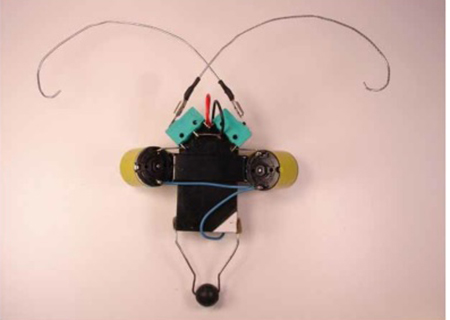
شکل کلی ربات ما تا الان به این صورت است که در شکل می بینید .
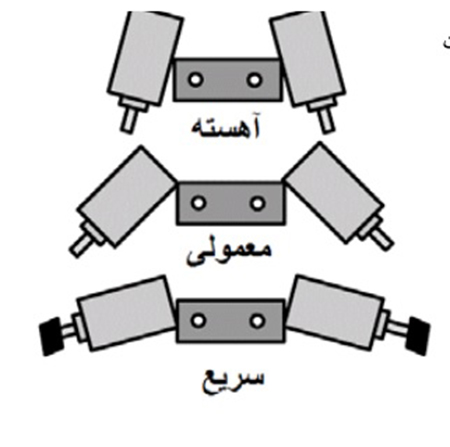
شکل کلی ربات ما تا الان به این صورت است که در شکل می بینیدشما می توانید با تنظیم زاویه ی موتورها نسبت به سطح افقی سرعت ربات خود را نیز تنظیم کنید.
توجه : در تمام مراحل باید دقت داشته باشید که وزن ربات شما سنگین نشود .
دراین مرحله چون تعادل ربات حفظ نمی شود باید یک چرخ برای قسمت انتهای آن بسازیم که مطابق شکل زیراین کار راانجام می دهیم .
در مرحله ی بعد قسنتهای دیگر را نیز مطابق شکل لحیم کاری می کنیم
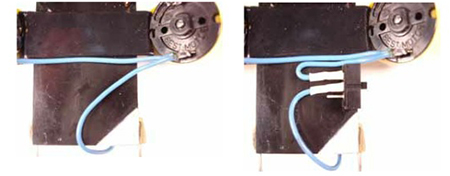
در این مرحله حتما متوجه کمبود اتصال و جریان برای موتورها شده اید !!
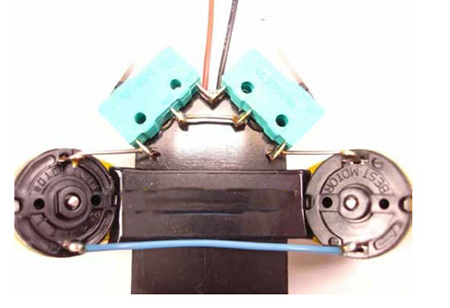
سیمهای باطری به تاچ سنسورها متصل می شوند پس موتورها برای دریافت جریان باید با سیم سومی که در تصویر به رنگ آبی میبینیدبه باطری مطابق شکل وصل می شون
حالا نوبت به اتصال سیمهای باطری میرسد که مطابق شکل انها رانیز به تاچ سنسورها متصل می کنیم،در این تصویر سیم قرمز ،مثبت باطری وسیم مشکی منفی باطری است ، در این مورد دقت شود
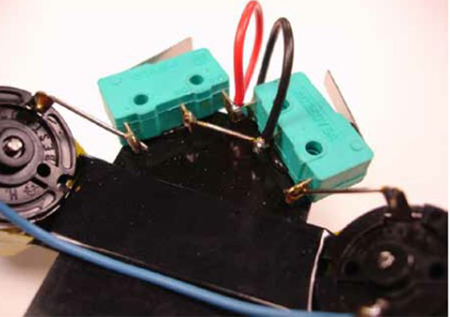
ربات تقریبا اماده است ولی برای فشرده شدن کلید تاچ سنسور باید اندازه ی کلید های آن یا همان سنسورهای حساس به برخورد بلند تر شود که این کار را با استفاده از چند فیش معمولی و سیم انجام می دهیم.

حالا شکل کلی ربات بصورت زیر است:.
بهتر است که یک کلید هم برای روشن و خاموش شدن ربات قرار دهیم که انرا مطابق شکل در قسمت سیم رابط موتورها وباطری قرار می دهیم
ربات شما آماده شده است
به شما برای ساخت این ربات تبریک می گویم
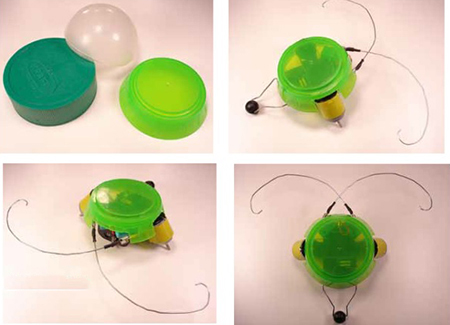
اگر از ظاهر رباتتان خوشتان نمی آید می توانید با ابزار خیلی ساده انرا زیبا سازی کنید .
پوریا قاسمی
.: Weblog Themes By Pichak :.